全国咨询热线
全国咨询热线

工业机器人轴承是工业机器人的关键配套件之一,工业机器人的轴承包括等截面薄壁轴承,交叉圆柱滚子轴承,谐波减速机轴承等。
工业机器人轴承的主要特点:
1.可承受轴向、径向、倾覆等方向综合载荷;
2.薄壁型轴承;
3.高回转定位精度;
任何可满足此种设计需求的轴承都可用于工业机器人手臂、回转关节、底盘等部位。
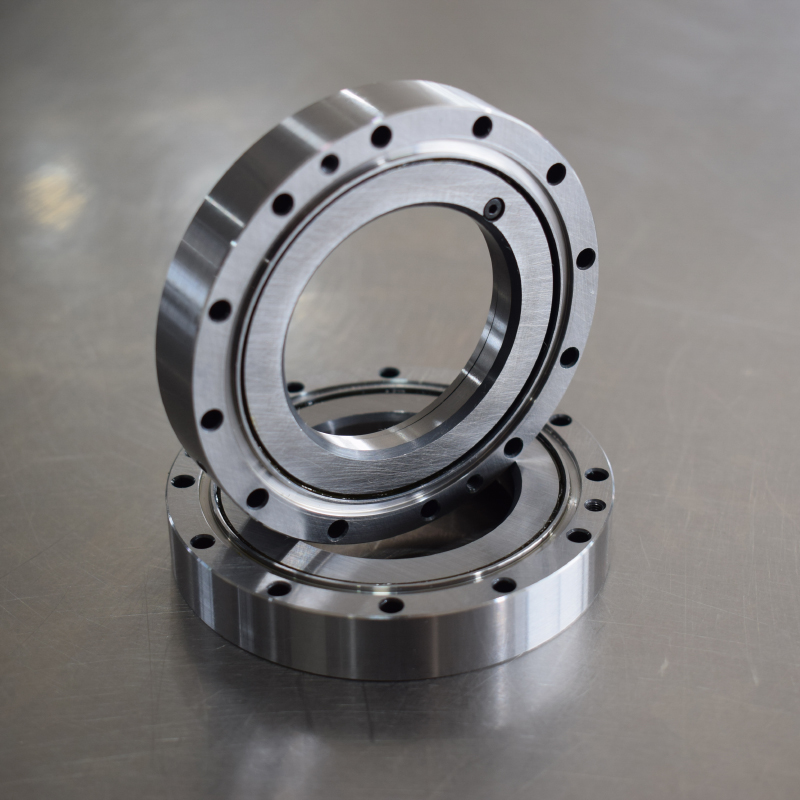
工业机器人用谐波减速机轴承鉴于其有限的安装空间与高承载要求,往往被设计成薄壁、非标轴承,又由于减速机运动的高精度要求,轴承的加工制造要求很是严格。依据其应用不同,主要分为以下几类:RV减速器轴承、谐波减速机轴承、摆线针轮减速器用轴承等
谐波减速机轴承曾经是用于机器人关节传动的主要装置,通过柔轮的弹性变形实现运动传递,弹性变形大。由于弹性变形会引起较大的弹性回差,导致机器人运动的准确性受到影响,主要应用于机器人小臂、腕部或手部等部位。谐波减速机轴承在传递负载时,变形的柔轮与刚轮并非是共轭齿廓啮合,造成其保证运动精度寿命较低。谐波减速机轴承所需要的柔性轴承是使其能够运动起来的关键零部件,此类轴承在使用过程中会产生周期性的交变应力,加之轴承壁厚较薄,对轴承材料及加工制造都提出了很高的要求。
工业机器人谐波减速机轴承在使用中,不仅能保证足够的承载能力,还有准确的定位能力、运转灵活能力等特点。因此,需要工业机器人轴承具备很高的承载能力,很高的精度和刚性,还必须满足低摩托力矩、长寿命、高可靠性的性能,谐波减速机轴承完全可以满足。
洛阳鸿元轴承科技有限公司

微信二维码
微信号:18837917076Copyright © 2005-2024 洛阳鸿元轴承科技有限公司 版权所有 备案号:豫ICP备10000262号-8
